






Project Description
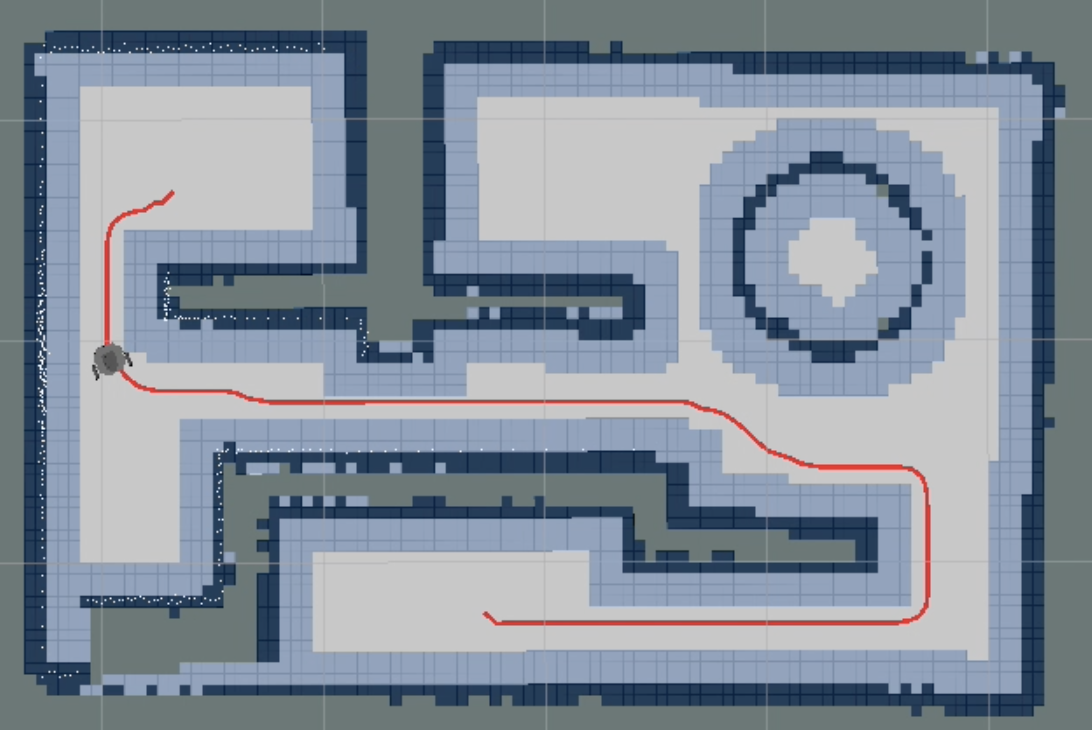
In this project, we applied simultaneous localization and mapping (SLAM) using a simulated robot to autonomously explore and map an unknown maze, navigate to its starting position, and localize itself on a saved version of the map.