






Project Description
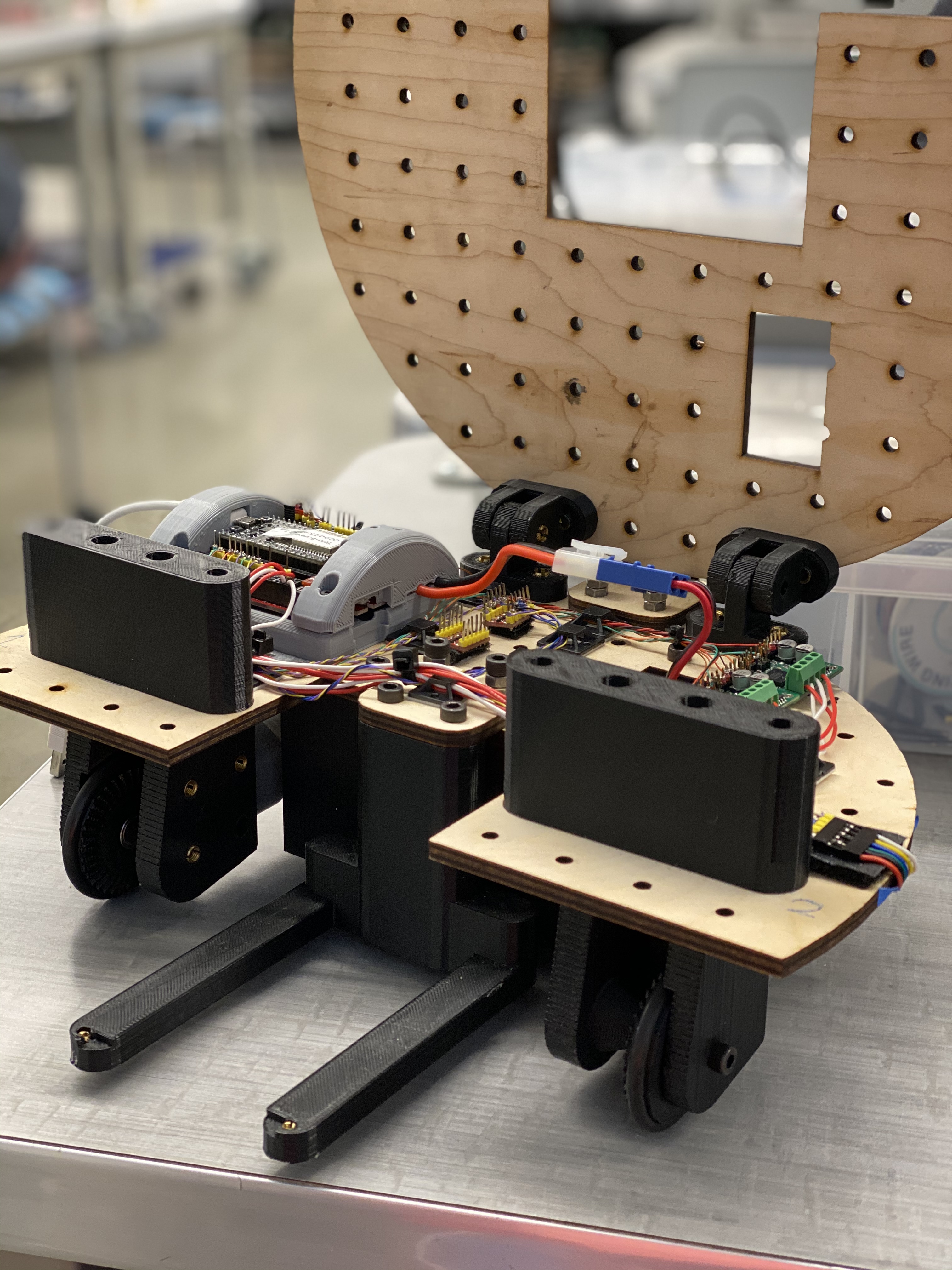
In this project, we combined sensor data from encoders, and an IMU to navigate a complex game field, relying on sensors to detect the environment. We applied forward and inverse kinematics to understand the position of the robot in the field. This data was used to explore a known environment using search algorithms to detect a “beacon” using analog filters.