






Overview
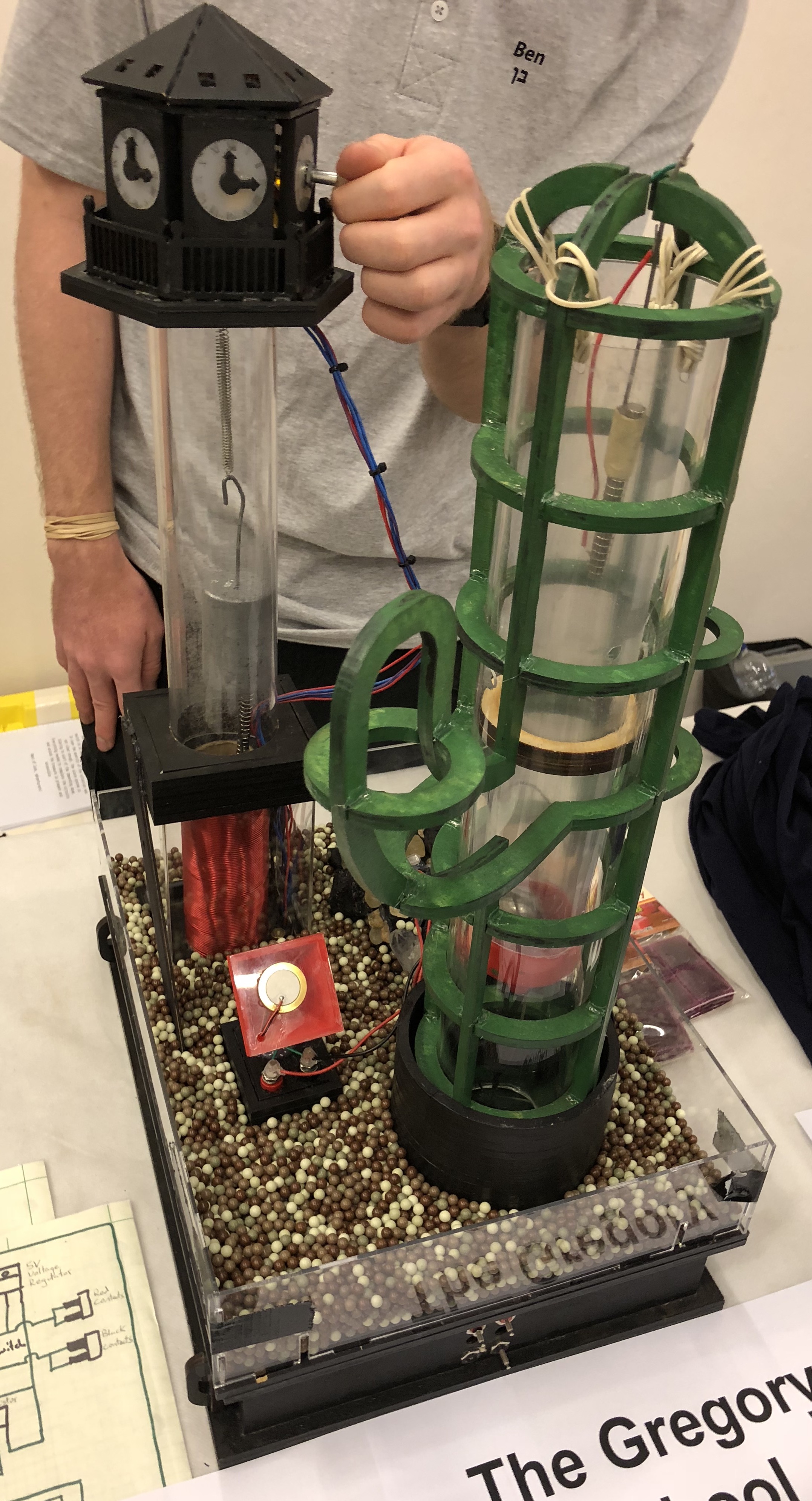
As co-captain of the team, we designed and built a “safe” using puzzles designed with concepts just above basic physics to compete against teams from many other countries.
Safe Details and Concepts
Piezoelectricity
Piezoelectricity is the appearance of biased charges on opposing faces of a piezoelectric material when mechanical stress is applied. We use a piezoelectric material as a voltage source in our safe. Examples of piezoelectric materials include some crystals, ceramics, and biological materials. These materials exhibit piezoelectricity because of their specific atomic structure. The applied stress leads to the change in the position of the atoms, resulting in the formation of net dipole moments that cause polarization, and an electric field, respectively. We use the principle of piezoelectricity in our safe to trigger a coil, which creates a magnetic field.
Resonant Frequency
Every system has a natural resonant frequency, or frequency at which the system will oscillate when external stimuli is applied. The resonant frequency occurs when the amplitude of the oscillation, or the extent of displacement in response to each oscillation, is at a maximum. A system’s resonant frequency amplitude can be enhanced using the principle of superposition through constructive interference. This phenomenon is called mechanical resonance. It relies on applying a force that matches that of the motion of the mass. We use the principle of mechanical resonance in our safe to allow a weight spring system to reach an amplitude great enough to reach a magnet, completing a circuit to allow access to the next part of the safe.
Granular Segregation
Granular matrices exhibit patterns of behavior similar to those of fluids when exposed to mechanical stimuli. When vibrated at a specific frequency, the granular media may organize and form a crystal lattice matrix. If the frequency changes, the granular matrix may start behaving like a fluid and mix in a convective pattern, “liquify”, “bubble” or “boil”. Flow within a granular matrix inside a control volume like a cylinder may result in sorting of particles due to size and not density, where larger particles may rise to the top of the matrix or sink depending on the frequency of external mechanical motion that is applied to the control volume. In our safe we use the principle of granular sorting to move a heavy magnetic ball of greater diameter and density than the surrounding matrix, to the top of a control volume column.